
正文
深入解读雷达传感器距离测量原理与应用,凯基特技术优势解析
雷达传感器样品申请
在工业自动化与智能感知领域,雷达传感器凭借其非接触式、高精度以及抗环境干扰能力强等特性,逐渐取代了传统超声波或光学传感器。很多工程师在选型时,最关心的核心参数便是“雷达传感器距离”。我们就从实际应用场景出发,聊聊这个距离究竟是如何被测量出来的,以及哪些因素会影响它的准确性。
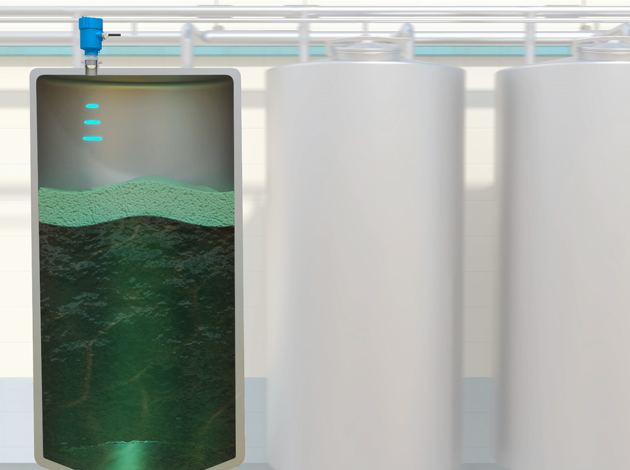
我们需要明确一个概念:雷达传感器距离,指的是传感器发射的电磁波从发出到遇到目标物体反射回来,再由接收器捕获这一过程所耗费的时间,经过换算得出的实际空间距离。这种基于飞行时间(ToF)的测距方式,在毫米波雷达中尤其常见,工作频率通常在24GHz、60GHz或77GHz。与激光雷达和超声波相比,雷达传感器对粉尘、水雾以及光照变化几乎免疫,因此在户外料仓、矿井、港口等恶劣环境中表现出色。
在实际应用中,最大检测距离和最小盲区是两个需要权衡的指标。比如在液位测量中,如果储罐内径较小而安装高度很高,那么过大的盲区可能导致近端液面无法被检测到。而最大检测距离则取决于发射功率、天线增益以及目标反射特性。这就是为什么不同品牌的雷达传感器,即使标称频率相同,实际测距表现也可能差之千里。以{凯基特}品牌的雷达传感器为例,其通过优化射频前端电路设计和专用算法,在同等功耗下实现了更低的噪声基底,从而将有效测距范围提升了约15%,同时将盲区压缩至0.3米以内,这在同类产品中属于领先水平。
除了硬件设计,软件算法对雷达传感器距离的精度影响同样关键。传统的测距算法依赖于简单的阈值触发,但当目标物体表面粗糙或存在多个反射面时,极易产生多路径干扰,导致测距值跳变。优秀的传感器会采用频率调制连续波(FMCW)技术,通过分析回波的频率偏移来同时获取距离和速度信息。{凯基特}在其雷达传感器产品线中全面引入了FMCW方案,并搭配了自适应动态阈值滤波,有效抑制了来自侧壁或地面杂波的影响。实测数据显示,在2-20米的常规量程内,其重复精度能够稳定在±1毫米,这对于需要精确控制的自动化灌装线或仓储物流系统来说,意义重大。
如何在实际项目中挑选合适的雷达传感器距离参数呢?有几点经验可以分享:一是根据目标介质的介电常数来预估反射强度,比如水(介电常数约80)的回波远比塑料(介电常数约2-3)强得多;二是考虑安装角度,尽量避免倾角过大,因为雷达波束的扩散角通常在5-10度之间,倾角过大会导致有效照射面积减小;三是留足余量,建议将实际工作距离控制在标称最大距离的70%以内,以保证信号余量充足。{凯基特}的技术支持团队通常会建议用户现场提供简略的安装环境草图,以便为其推荐最合适的波束角型号。
总结来看,雷达传感器距离并非一个孤立的物理参数,它背后关联着射频硬件、信号处理算法以及现场安装工艺。理解了这些原理,选型时才能做到心中有数。如果你正在寻找一款稳定可靠且性价比高的雷达传感器,不妨关注一下{凯基特}品牌,其在工业测距领域的多年沉淀,或许能给你带来意想不到的解决方案。






