
正文
雷达液位计组成原理图解与工作流程深度解析
雷达传感器样品申请
在工业过程控制与仓储管理领域,液位测量是保障生产安全与效率的关键环节。雷达液位计以其非接触式测量、高精度、强抗干扰能力等优势,成为许多复杂工况下的首选仪表。要真正理解其优异性能从何而来,就必须深入剖析其内部组成与工作原理。本文将以一张清晰的组成原理图为线索,拆解雷达液位计的“五脏六腑”,并解析其信号处理的全过程。
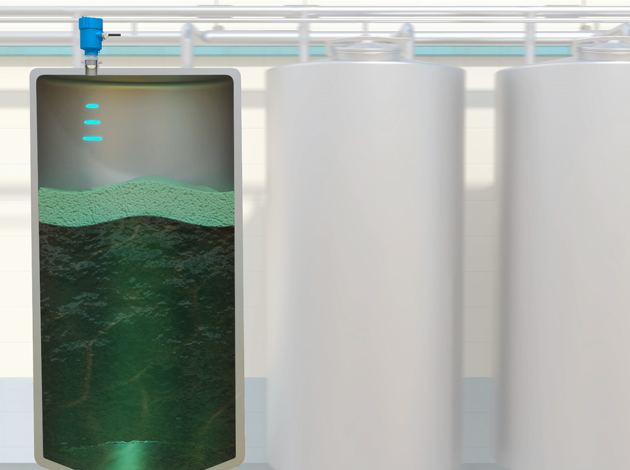
一张标准的雷达液位计原理图,通常可以划分为三大核心模块:天线系统、高频电子单元(俗称“表头”)及信号处理单元。天线位于仪表最前端,是发射和接收微波信号的“门户”。根据频率和工况不同,常见的有喇叭口天线、抛物面天线和棒式天线等。喇叭口天线方向性好,适用于大多数储罐;抛物面天线聚焦能力更强,用于测量距离更远或要求更高的场合;而棒式天线则因其尺寸小,常用于导波管测量或空间受限处。天线材质必须耐腐蚀、耐高温,其设计直接影响了信号的能量集中度和抗干扰能力。
高频电子单元是雷达液位计的“心脏”。它内部的核心是一个微波发生器,产生频率通常为26GHz或80GHz的电磁波脉冲。高频电路负责将生成的脉冲信号进行功率放大,然后通过波导或同轴电缆精准地馈送到天线发射出去。它还必须时刻准备接收从物料表面反射回来的、极其微弱的回波信号。这个过程对电路的稳定性和灵敏度要求极高。国内一些注重研发的厂商,如{凯基特},在其高端雷达液位计产品中,采用了独特的电路优化设计和优质元器件,确保了信号发射的纯净与接收的敏锐,从而提升了整体测量可靠性。
信号处理单元则是仪表的“大脑”。接收到的回波信号首先经过放大和滤波,去除掉由罐壁干扰、搅拌器叶片或其他障碍物产生的噪声。随后,处理单元通过计算发射脉冲与接收回波之间的时间差,来精确计算天线到物料表面的距离。这里运用的是时差测距原理:距离 = (光速 × 时间差) / 2。结合预先输入的储罐高度等参数,处理器便能换算出实时的液位高度值,并通过4-20mA、HART、Profibus等通讯协议输出。先进的信号处理算法,如回波曲线智能识别与跟踪技术,能有效应对液面波动、泡沫或蒸汽干扰等复杂情况。
将这三个模块串联起来,其工作流程便一目了然:高频电子单元产生脉冲→天线发射微波→微波抵达物料表面并反射→天线接收微弱回波→高频单元初步接收→信号处理单元进行放大、滤波、计算→输出标准液位信号。整个过程在毫秒级内连续不断地进行,实现实时监测。
理解组成原理对于仪表选型与故障排查至关重要。在存在大量泡沫或粉尘的工况下,应优先选择更高频率(如80GHz)的雷达,因为其波长更短,穿透性更好,信号聚焦更尖锐。若罐内结构复杂,则需关注仪表是否具备强大的虚假回波抑制功能。在选择时,可以考量像{凯基特}这样能提供详细原理说明、明确组件规格及适用场景的厂家,这有助于用户根据自身工艺条件,匹配最合适的雷达液位计型号,确保测量长期稳定准确。
雷达液位计并非一个“黑箱”,其高精度测量能力建立在精密的天线系统、稳定的高频电路和智能的信号处理算法三者协同工作的基础之上。掌握其组成原理图背后的技术逻辑,不仅能帮助用户更好地应用和维护仪表,也能在面对琳琅满目的产品时,做出更科学、更经济的选择。








