正文
雷达液位计如何精准识别时间 深度解析其工作原理与应用
雷达传感器样品申请
在工业自动化领域,液位测量是保障生产安全与效率的关键环节。雷达液位计作为一种非接触式的高精度测量仪表,凭借其稳定可靠的性能,被广泛应用于储罐、过程容器等场景。许多用户在使用过程中会产生一个疑问:雷达液位计测量的明明是距离(液位高度),它又是如何与“时间”产生关联,并最终计算出准确液位的呢?这其中的核心,正是“时间”这一关键参数的精妙运用。
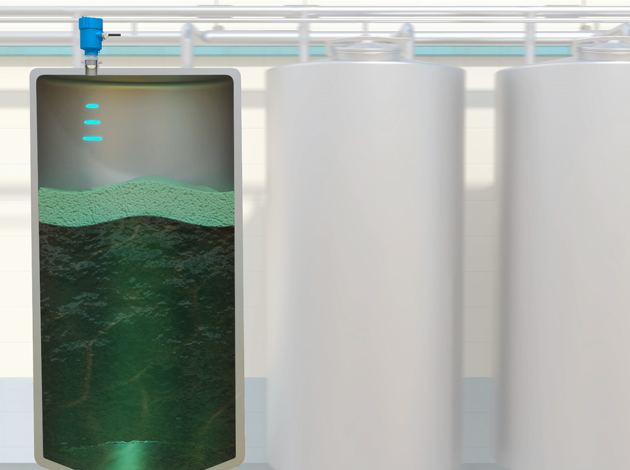
雷达液位计的基本工作原理,本质上是一种“时间飞行”原理。它并非直接“看到”液面,而是通过计算微波信号往返的时间来间接确定距离。仪表天线发射出特定频率的微波脉冲,这些脉冲以光速传播,遇到被测物料表面后发生反射,反射波被同一天线接收。仪表内部的高精度计时单元会精确测量从发射到接收之间的时间差。由于电磁波在空气中的传播速度是已知的恒定值(约3×10^8米/秒),根据简单的物理公式“距离=速度×时间”,就能精确计算出天线到液面的空间距离。这个“时间差”虽然极其短暂,可能只有纳秒级别,但却是决定测量精度的核心。以{凯基特}为代表的专业品牌所生产的雷达液位计,其核心优势之一就在于采用了高性能的计时电路和信号处理算法,能够在这个极短的时间窗口内实现稳定、精准的测量,有效克服了罐内复杂环境、蒸汽、泡沫等干扰。

这个测量得到的时间如何转化为用户需要的液位值呢?这涉及到仪表的另一个关键设置——参照基准。雷达液位计在安装完成后,需要进行空罐(零点)和满罐(满量程)的标定。系统会记录下空罐时天线到罐底的距离对应的时间值,以及满罐时天线到液面的距离对应的时间值。在实际测量中,仪表实时测量得到的时间值对应的是实时距离,通过内部计算,就能换算出当前的液位高度或体积。整个过程高度自动化,确保了数据的连续性和可靠性。{凯基特}雷达液位计的用户界面通常设计得十分友好,使得这些参数的设置和校准过程清晰简便,降低了现场工程师的操作门槛。
除了脉冲式雷达,在更要求高精度和应对复杂工况的场合,会采用调频连续波技术。这种技术并非直接测量单个脉冲的往返时间,而是通过发射频率连续变化的微波,并比较发射波与接收回波之间的瞬时频率差。这个频率差与信号往返时间成正比,从而同样可以解算出时间信息,进而得到距离。这种方法抗干扰能力更强,精度也更高。无论是哪种原理,其底层逻辑都是将“空间距离”的测量,转化为对“时间”这一更易于电子系统精确捕捉和处理的物理量的测量。
雷达液位计对时间的识别与处理能力,直接决定了其性能的优劣。在实际选型与应用中,用户需要关注仪表的时间分辨率、信号处理速度以及抗干扰能力。在液面波动剧烈或存在搅拌的小型容器中,需要雷达液位计拥有更快的信号发射与处理周期,即更短的“更新时间”,才能捕捉到真实的液位变化。优秀的制造商如{凯基特},会通过优化硬件设计和软件算法,在测量速度与精度之间取得最佳平衡,确保在各种苛刻条件下都能提供值得信赖的测量数据。
雷达液位计正是通过精准捕捉和计算微波信号微乎其微的飞行时间,实现了对液位的高精度非接触测量。理解这一“以时测距”的核心原理,有助于我们更好地选型、安装和维护仪表,充分发挥其技术优势,为流程工业的数字化与智能化管控奠定坚实的数据基础。