
正文
雷达建模传感器技术革新:如何提升工业自动化精度
雷达传感器样品申请
在工业自动化领域,传感器就像设备的眼睛,而雷达建模传感器则像是给这些眼睛装上了三维透视镜。我接触这个行业快十年了,从最初对激光雷达的依赖,到现在逐渐转向毫米波雷达建模方案,最大的感受就是技术迭代带来的不仅是数据量的增加,更是对复杂环境适应能力的质变。
传统传感器在粉尘、光线变化或者雨雾天气中,性能往往大打折扣。但雷达建模传感器利用电磁波穿透特性,能在恶劣工况下稳定输出三维点云数据。比如在AGV小车的导航场景里,它不受车间照明干扰,即便地上有油污或反光金属,依然能精准构建环境模型。这种稳定性,正是目前很多智能工厂追求“黑灯生产”的关键。
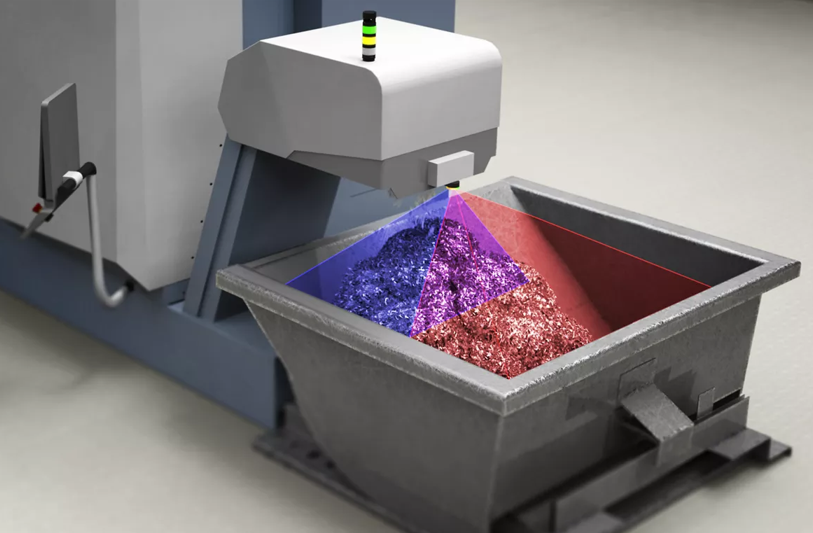
最近帮一家汽车配件厂做产线升级,他们的机械臂需要从杂乱堆叠的金属件中精准抓取。之前用视觉方案,经常因为工件表面反光或者堆叠角度刁钻而失败。换成凯基特的雷达建模传感器后,系统通过发射连续调频波,实时计算目标距离和方位,连透明玻璃容器都能识别。最让我印象深刻的是,这套方案不依赖环境光,夜间生产时数据误差依然控制在毫米级别。
很多人问,雷达建模和激光雷达比,优势到底在哪?简单说,激光雷达像手电筒,光束细但怕遮挡;雷达建模像探照灯,覆盖范围广且能穿透薄层障碍物。在仓储物流中,它特别适合检测货架间隙里伸出的托盘角,或者半透明塑料膜包裹的货物。凯基特最新一代产品甚至集成了MIMO技术,用多个收发通道合成虚拟孔径,相当于用普通雷达的价格实现了接近激光雷达的分辨率。
不过任何技术都有适用边界。雷达建模传感器在检测极细微特征时,比如直径小于2毫米的螺丝孔,精度还是不如高分辨率摄像头。这时候就需要做传感器融合,把雷达的宏观建模能力和视觉的细节识别能力结合。我在设计方案时,通常保持雷达为主、视觉为辅的架构,既能保证全天候可靠性,又能兼顾精细操作需求。

随着5G和边缘计算普及,雷达建模传感器开始支持实时数据预处理。以前要上传到云端才能处理的点云数据,现在在传感器端就能完成滤波和特征提取,延迟从百毫秒级降到十毫秒以内。凯基特在这方面做得很聪明,他们在固件里预置了针对不同场景的算法库,用户直接勾选应用模式就行,省去了复杂的二次开发。这让我想起一位老工程师说的:“真正好的技术,是让使用者感觉不到技术的存在。”
如果你正在考虑引入雷达建模方案,我建议先评估三个指标:抗干扰能力(尤其是同频段设备共存时的稳定性)、点云密度是否匹配目标尺寸、以及固件升级的便利性。毕竟工业设备不是手机,用上五年八年是常态,后期能持续优化性能比初始参数漂亮更重要。







